

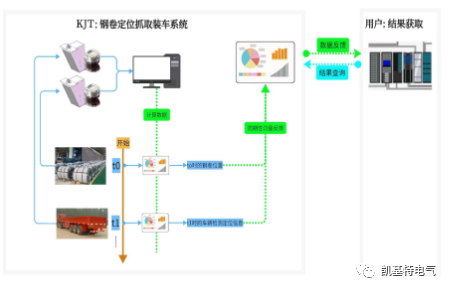
鋼卷成品庫在搬運(yùn)鋼卷時(shí),操作工人借助車間吊車完成;而鋼卷的抓取,則是由起重機(jī)上安裝的吊具或機(jī)械手臂來完成,吊具抓取物品是一個(gè)復(fù)雜的過程,在抓取鋼卷的過程中,最關(guān)鍵的技術(shù)就是控制吊具精確地定位到鋼卷的位置,完成抓取動作。目前世界上已投入使用的鋼卷抓取系統(tǒng),在工作方式上,一般都需要一個(gè)經(jīng)驗(yàn)豐富的操作員,對機(jī)械手吊具進(jìn)行遠(yuǎn)程手動控制,達(dá)到機(jī)械手或吊具精確定位的目的。對操作員的要求非常高,否則很難達(dá)到很高的精度,常因?yàn)椴?/span>作員的定位不準(zhǔn)而使吊具與鋼卷發(fā)生碰撞造成損傷。起重機(jī)啟停與搬運(yùn)線路的人工控制,會帶有一定的隨意與盲目性,使起重機(jī)運(yùn)行效率不高,導(dǎo)致設(shè)備的能源浪費(fèi),增加了搬運(yùn)成本。天車系統(tǒng)也被稱為自動物料搬送系統(tǒng),現(xiàn)在在許多鋼卷成品庫都采用了無人自動天車系統(tǒng),相比于人工操作夾取鋼卷,無人天車系統(tǒng)確實(shí)提高了效率節(jié)省了人工。但是現(xiàn)在的天車系統(tǒng)存在一個(gè)問題,雖然現(xiàn)有天車系統(tǒng)定位已經(jīng)比較精準(zhǔn),但是并不能保證鋼卷精準(zhǔn)定位,難免會出現(xiàn)鋼卷抓取不完全的現(xiàn)象。 用于自動測量定位鋼卷并用于天車自動抓取,系統(tǒng)將鋼卷及運(yùn)輸車輛的測量結(jié)果發(fā)送到上位控制系統(tǒng),用于抓取導(dǎo)航及定位。 1、各種車輛類型3D識別算法 2、鋼卷的準(zhǔn)確定位算法處理 3、鋼卷裝車擺放位置的特征定義以及提取 4、整體出入庫管理的系統(tǒng)解決方案 1、得益于最先進(jìn)的激光測量技術(shù)的高精度測量結(jié)果 2、結(jié)合客戶工藝流程定制開發(fā)的系統(tǒng)解決方案能力 3、自動化檢測過程減少人工投入,助力實(shí)現(xiàn)無人化










咨詢熱線(Tel):025-66075066
售后電話(Tel):025-66018619
代化傳感器企業(yè)")



















|電感式接近開關(guān)產(chǎn)品型號-參數(shù)-接線圖")
產(chǎn)品型號-參數(shù)-接線圖")
品型號-參數(shù)-接線圖")
|電感式接近開關(guān)產(chǎn)品型號-參數(shù)-接線圖")
液位檢測公司,精準(zhǔn)測量,助力工業(yè)安全高效")









